ROS-Pi ROBOTの構想設計を行います。
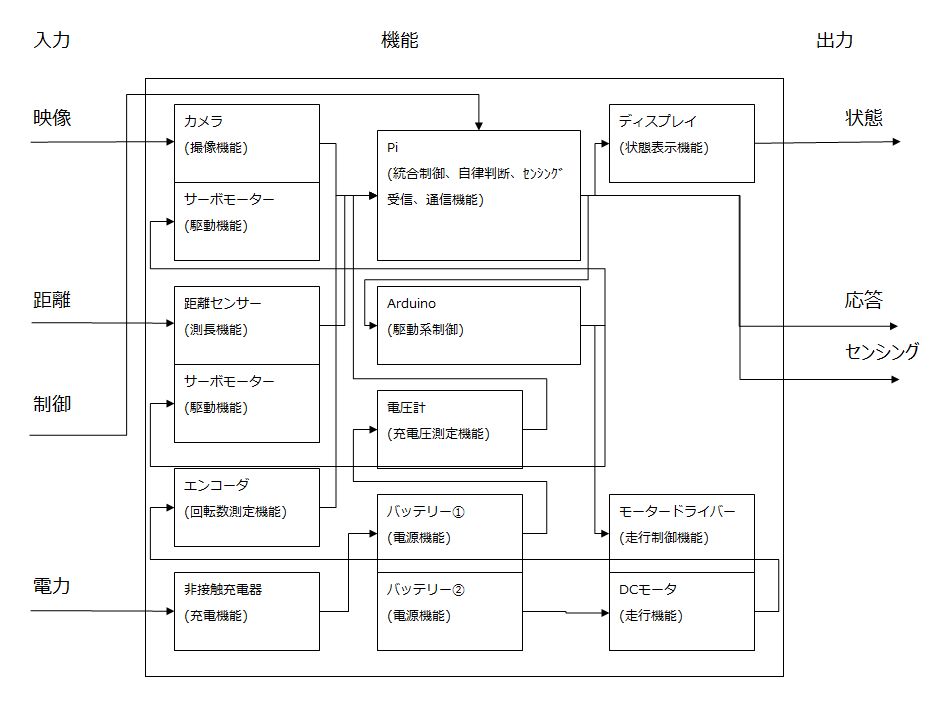
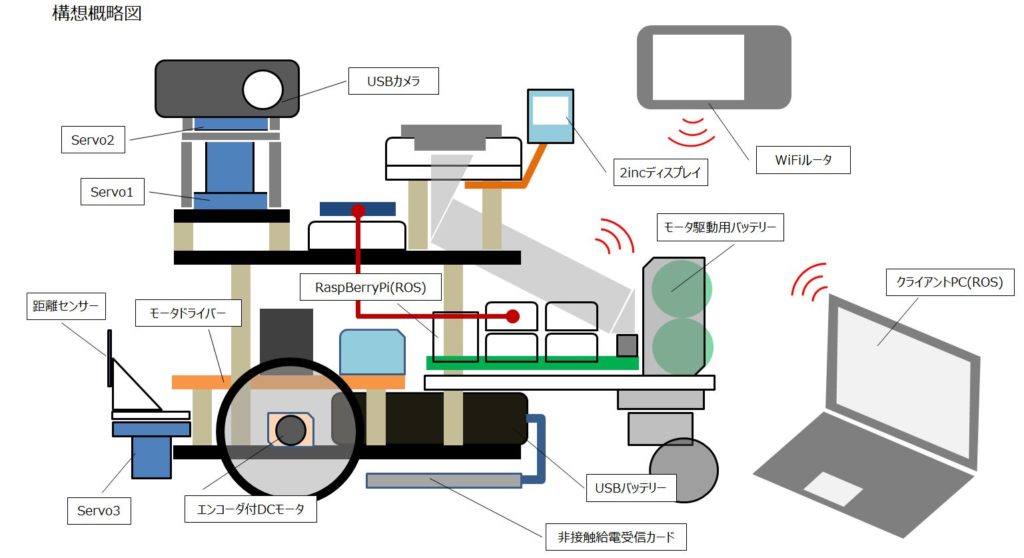
自律型の2輪走行ロボットなので車体とモータ、モータを駆動するバッテリーが必要です。マッピングを行うのであれば走行距離を算出しやすいサーボモータを使用したいところですが、今回予算の関係上エンコーダ付きDCモータにします。センサー機能は即位用の距離センサーと二軸可動のUSBカメラを付け、モータ含めたこれら駆動系の制御にAdruinoを使用します。センサーデータ、システム全体とネットワーク系の制御にはRaspberryPiを使用し、制御系用のモバイルバッテリーに非接触給電受信カードを接続することで、電圧降下時の自律充電を実現します。ロボットがセンシングしたデータは、ROSを入れたクライアントPCで受信し、IoTダッシュボードでの表示及び学習処理を実行することで、ロボットのインテリジェンスを向上するシステムを構築してみます。機能ブロック図、構想概略図とロボット製作の部品表(概算見積表)を↓に載せておきます。
| ユニット | 項 |
品名 |
部位 | メーカ | 個数 | 単価 | 合価 |
| 車体 | 1 | KeyestudioのBluetooth超音波スマートカーロボットスタータDIYキット | 車体 | Keystudio | 1 | 6,200 | 6,200 |
| 2 | 75:1 シャフト付き超小型メタルギアドモータHP | モータ+ギア | スイッチサイエンス | 2 | 2,192 | 4,384 | |
| 3 | シャフト付き超小型メタルギアード用磁気式エンコーダ(2個入り) | エンコーダ | スイッチサイエンス | 2 | 578 | 1,155 | |
| 4 | キャスター | 車輪 | ??? | 1 | 100 | 100 | |
| 5 | DXW 90 5PCS 9gマイクロミニサーボモータホーン | サーボモータ | DXW | 3 | 242 | 726 | |
| 6 | UCAM-C0220FEBK | USBカメラ | エレコム | 1 | 1,500 | 1,500 | |
| 7 | 2本18650充電池3.7 V 5000 mAhと高速充電器 | モータ用バッテリー | Hqd | 1 | 1,380 | 1,380 | |
| 8 | VL53L0X Time-of-Flight距離センサーモジュール | レーザ距離計 | スイッチサイエンス | 1 | 1,512 | 1,512 | |
| 9 | HiLetgo 0.96″ SPIシリアル 28x64 | ディスプレイ | HiLetgo | 1 | 750 | 750 | |
| 10 | Shallen 極薄Qiワイヤレス充電レシーバ | ワイヤレス充電レシーバ | SHARLLEN | 1 | 880 | 880 | |
| 11 | QWワイヤレス充電器 10W急速充電器 | ワイヤレス充電器 | XuQubby | 1 | 1,499 | 1,499 | |
| 12 | ユニバーサルプレート | 車体 | タミヤ | 1 | 583 | 583 | |
| 制御 | 13 | RaspBerryPi3 B | 制御ボード | RspberryPi | 1 | 5,226 | 5,226 |
| 14 | Arduino_Nano | 制御マイコンボード | Arduino | 1 | 3,240 | 3,240 | |
| 15 | mobile_VOLTAGE | 制御基板用電源 | maxell | 1 | 700 | 700 | |
| 16 | PS3リモコン | 送信器 | Sony | 1 | |||
| 合計 | 29,835 | ||||||
F2_3(このサイトの管理者)
 某IT系の企業に勤めるメカ系エンジニア。IT企業の社員なのにITが嫌いなのでこのサイトを始めてみました。
某IT系の企業に勤めるメカ系エンジニア。IT企業の社員なのにITが嫌いなのでこのサイトを始めてみました。
検索
カテゴリー
過去の投稿
Links
SWISS knife
RaspberyPi
錬金術